
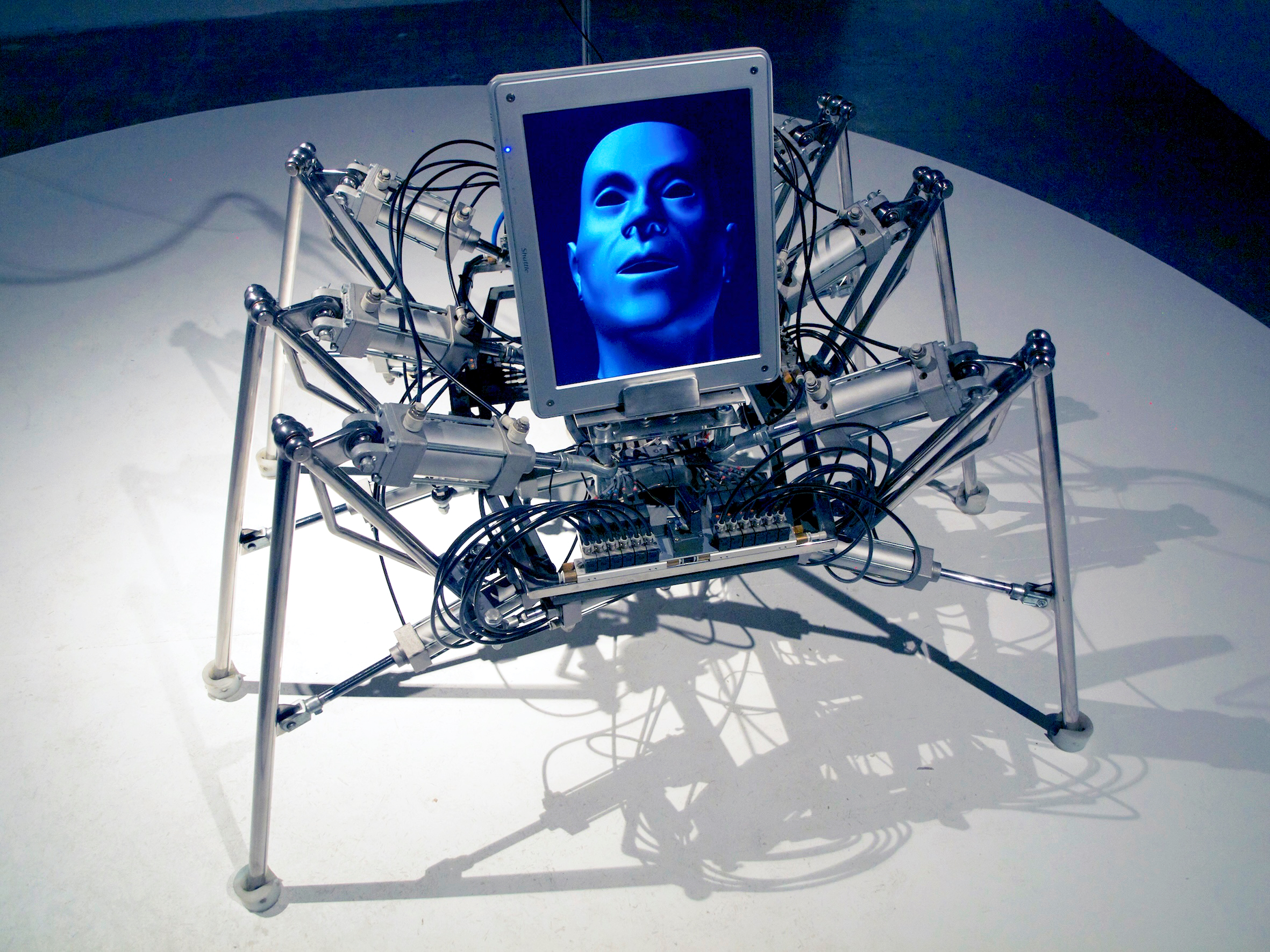
The WALKING HEAD is a 2m diameter 6-legged autonomous walking robot. Vertically mounted on its chassis is an LCD screen imaging a computer generated human-like head. The LCD screen can rotate from side to side. The robot has a scanning ultra-sound sensor that detects the presence of a person in front of it. It sits still until someone comes into the gallery space and approaches it- then it stands, makes a selection from a library of possible pre-programmed movements and performs its choreography. It then stops, sits and waits until it detects someone else. The robot performs on a 5m diameter platform and its tilt sensor system detects when it is close to the edge and backs off, walking in another direction. The Walking Head robot was intended to become an actual-virtual system in that its mechanical leg motions will actuate its facial behaviours of nods, turns, tilts blinks and its vocalizations. Other possibilities include the robot being driven by its web-based 3D model with a menu of motion icons that can be pasted together and played remotely. The robot is pneumatically actuated.
Credits
Creation: Stelarc
Engineering and robot programming: Steven Doepner, Lars Vaupel, Gwen Taube, and Jan Cummerow (f18, Hamburg)
The Walking Head implemented voice-enabled softbot agent technology developed by Steve Middleton at the Animation & Interactive Media Centre in Melbourne, 2001-2006.
Compressor and Gallery Installation: Floppy Sponge Automation
Robots used
A spider-like contraption with its inner working revealed for the audience and a screen portraying a 3D model of a head.


