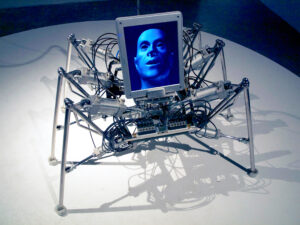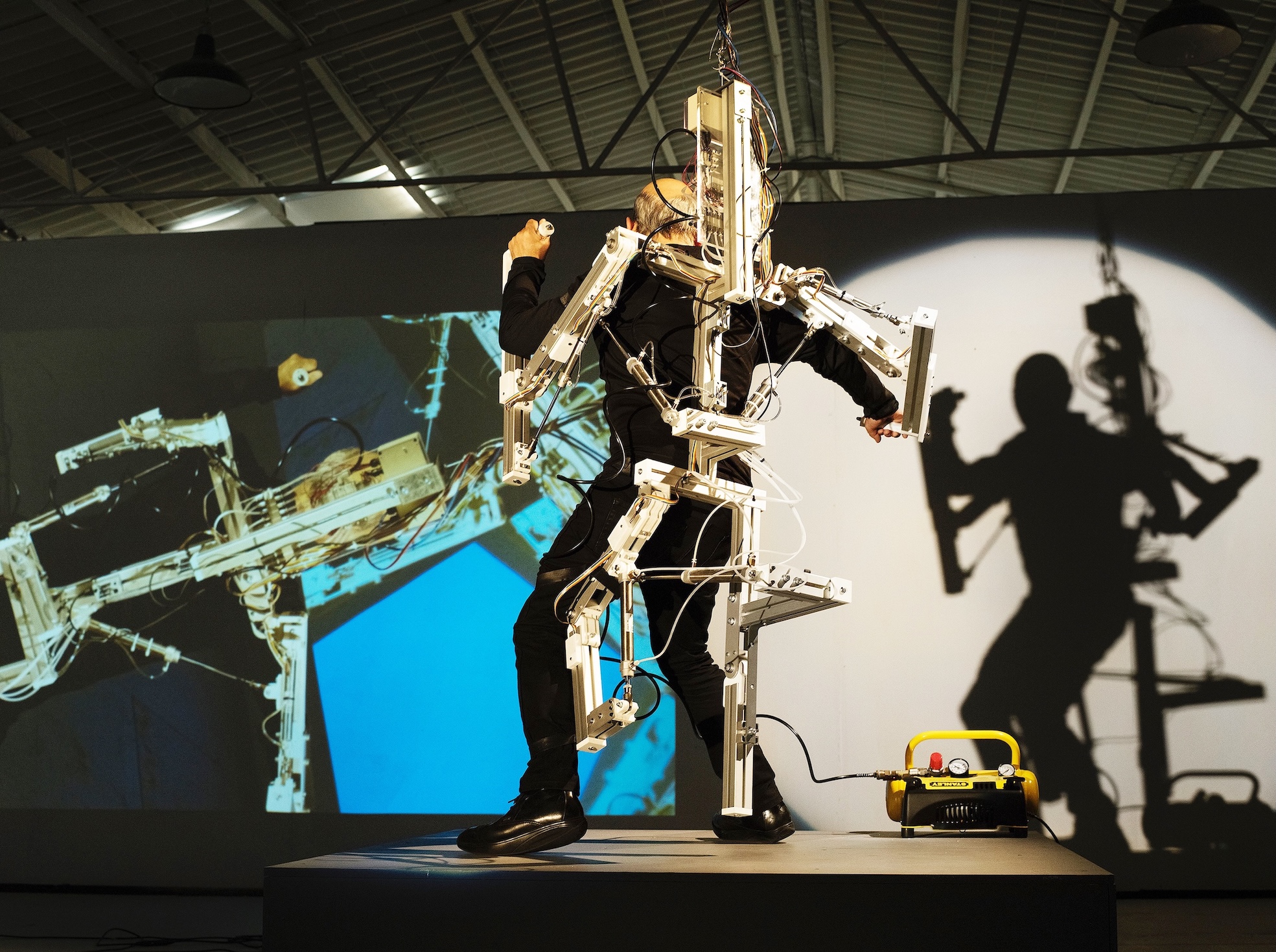
StickMan is a minimal but full-body exoskeleton that algorithmically actuates the artist with six degrees-of-freedom. Sixty-four possible combinations of gestures are generated. In recent iterations a miniStickMan interface was engineered. Visitors in the gallery space could insert their own choreography by bending the limbs of the interface. Sensors on StickMan generate sounds that augment the pneumatic noise and register the limb movements. A ring of speakers circulates the sounds, immersing the audience. Sound artist Petros Vouris and Audio engineer/programmer Alwyn Nixon-Lloyd have integrated a series of small contact microphones situated on the moving limbs of StickMan with the sounds generated, being treated with Max/MSP on an external computer. The addition of an I.S.U (Inertia Spacialiser Unit) is strung down StickMan’s spine like a monochord to generate fluctuating waves of sound as StickMan’s body vibrates with movement. Accelerometers and gyroscopes are attached to each moving limb on StickMan’s body tracking and moving the sounds generated across a multichannel speaker system, making the sounds themselves an extension of StickMan’s body.
Credits
Creation and Performance: Stelarc
Engineering: Tim Jewell
Programming: Steve Berrick
Audio Engineer: Alwyn Nixon-Lloyd
Video Production: Steven Aaron Hughes
Photographers: Toni Wilkinson & Steve Berrick
Additional assistance: Rodney Parsons and Paul Caporn
Robots used
A self-designed and -manufacturered exosuit, acting as an external shell to the artist’s own body, which he could manipulate and move within.