
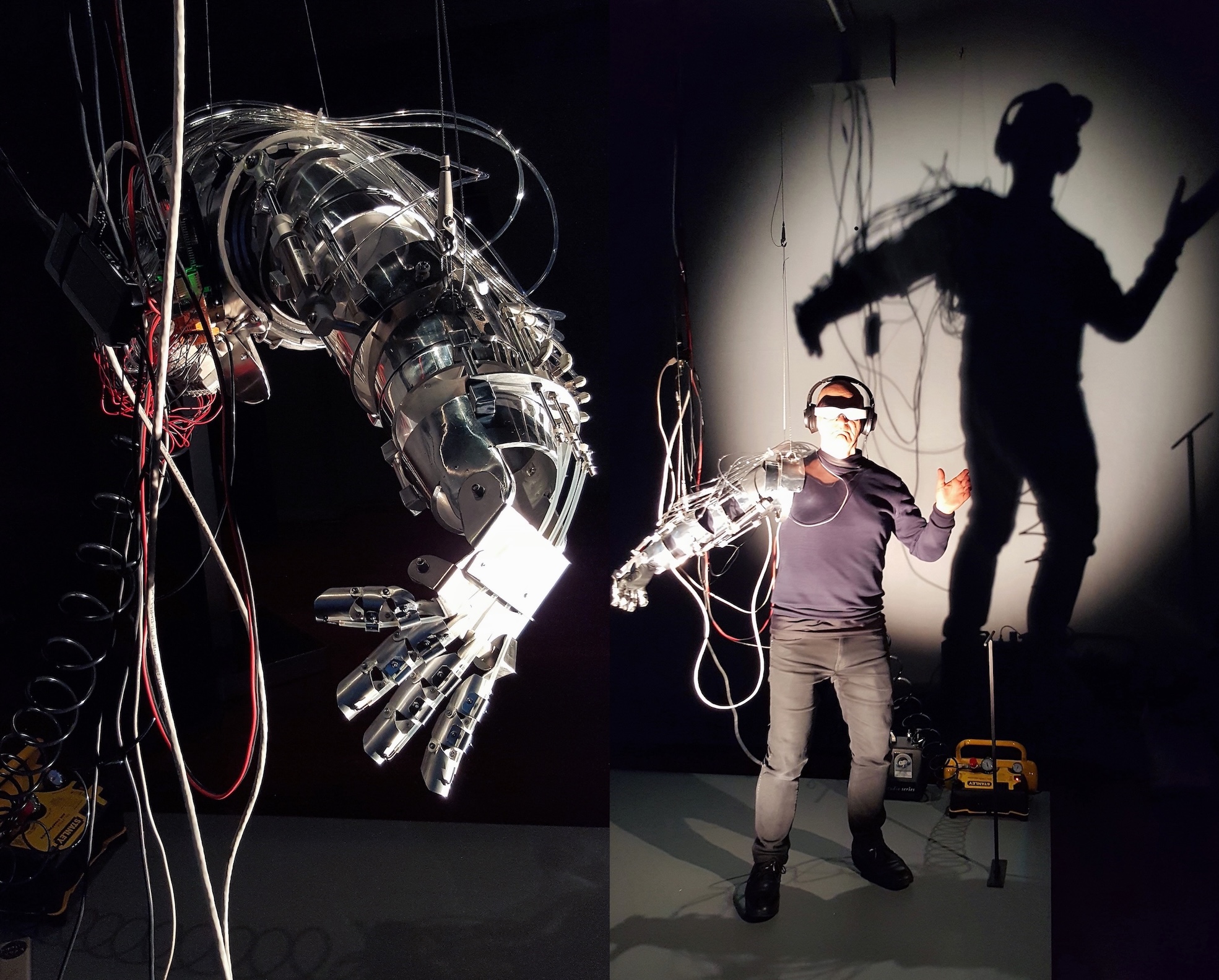
RE-WIRED / RE-MIXED: Event for Dismembered Body was an internet enabled performance that explored the physiological and aesthetic experience of a fragmented, de-synchronized, distracted and involuntary body – wired and under surveillance online. For five days, six hours a day continuously, wearing a video headset and sound cancelling earphones, the artist Stelarc could only see with the “eyes” of someone in London, whilst only hearing with the “ears” of someone in New York. The body was also augmented by a 7 degree-of-freedom exoskeleton enabling anyone anywhere to program involuntary movement of his right arm, using an online interface. In the gallery space itself, the choreography could be generated via a large touch-screen. What the artist was seeing and hearing could be experienced in the gallery space with a video projection and sound system. With his shadow projected on the wall behind him the choreography was flattened into one visual, coherent and chimeric phantom spectacle. The body was indifferent but not insensitive. Disturbed but not dismayed. Not a split mind and body but merely a body with split physiology. There was movement but not mobility. The body was tethered in place. In fact tethered to three different places. Effectively its upper body was elsewhere. Its lower body was grounded and located in place. What the body was hearing and seeing was what was happening the day before between 11:00 am – 5:00 pm in New York and London – the corresponding gallery hours in Perth. The artist became optically and acoustically de-synchronized and performed partly involuntarily. It was as if the body had been electronically dismembered, spatially distributed and possessed with multiple agencies.
Credits
Creation and Performance: Stelarc
Project Coordinator, Media Production: Steven Aaron Hughes
Engineering Exoskeleton Arm: Rodney Parsons
Programming, Exoskeleton Touch Screen, and Web Interface: Steve Berrick
Vision from London: Luke Robert Mason
Sound from New York: Lorin Roser
Video: Tanya Drayton, Robert Devcic, Valentina Serrati, Christine Bach
Robots used
A 6 degree-of-freedom exoskeleton arm that was worn and is actuated electronically in response to the input provided by audience members, whether physically in the gallery using a touch screen interface or with remote actuation online via the graphical user interface.


