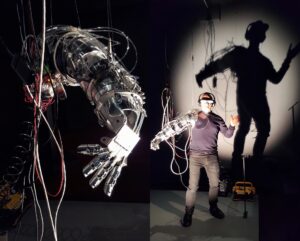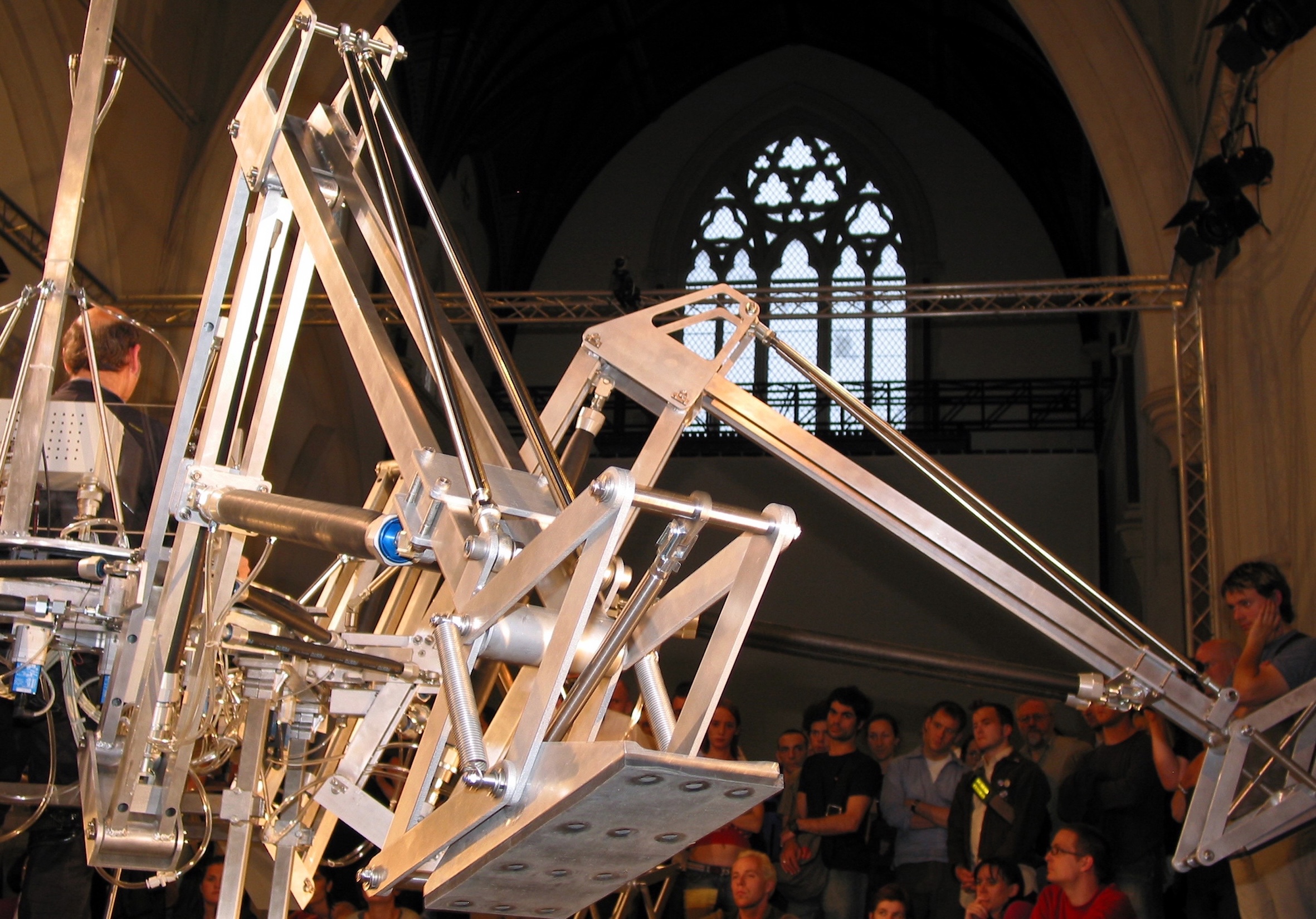
The Muscle Machine is a six-legged walking robot, five metres in diameter. It is a hybrid human-machine system, pneumatically powered using fluidic muscle actuators. The rubber muscles contract when inflated, and extend when exhausted. This results in a more flexible and compliant mechanism, using a more reliable and robust engineering design. The fluidic muscle actuators eliminate problems of friction and fatigue that were a problem in the previous mechanical system of the Hexapod prototype robot. The body stands on the ground within the chassis of the machine, which incorporates a lower body exoskeleton connecting it to the robot. Encoders at the hip joints provide the data that allow the human controller to move and direct the machine as well as vary the speed at which it will travel. The action of the artist lifting a leg lifts the three alternate machine legs and swings them forward. By turning its torso, the body makes the machine walk in the direction it is facing. Thus the interface and interaction is more direct, allowing an intuitive human-machine choreography. The walking system, with attached accelerometer sensors provide the data that generates computer structured sounds augmenting the acoustical pneumatics and operation of the machine. The sounds register and amplify the movements and functions of the system. The operator composes the sounds by choreographing the movements of the machine. Once the machine is in motion, it is no longer applicable to ask whether the human or machine is in control as they become fully-integrated and move as one. The 6-legged robot both extends the body and transforms its bipedal gait into a 6-legged insect-like movement. The appearance and movement of the machine legs are both limb-like and wing-like motion.
Credits
Creation and Performance: Stelarc
Project Coordinator: Barry Smith
Robot Consultant: Inman Harvey
Development/Project Manager: Philip Breedon
Choreography: Sophia Lycouris
Sensor Technology and Sound: Stan Wijnans
Pneumatic Circuits and Systems: Kerry Truman
Computer Aided Design: John Grimes
Leg Design: Lee Housten
Manufacturing Support: Alan Chambers
Robots used
A large 6-legged walking machine with an aluminium and stainless steel structure with pneumatic rubber muscles. Inserted within the machine structure, the artist with encoders on his leg exoskeleton enables him to translate human bipedal gait into 6-legged locomotion.