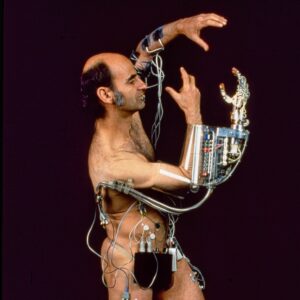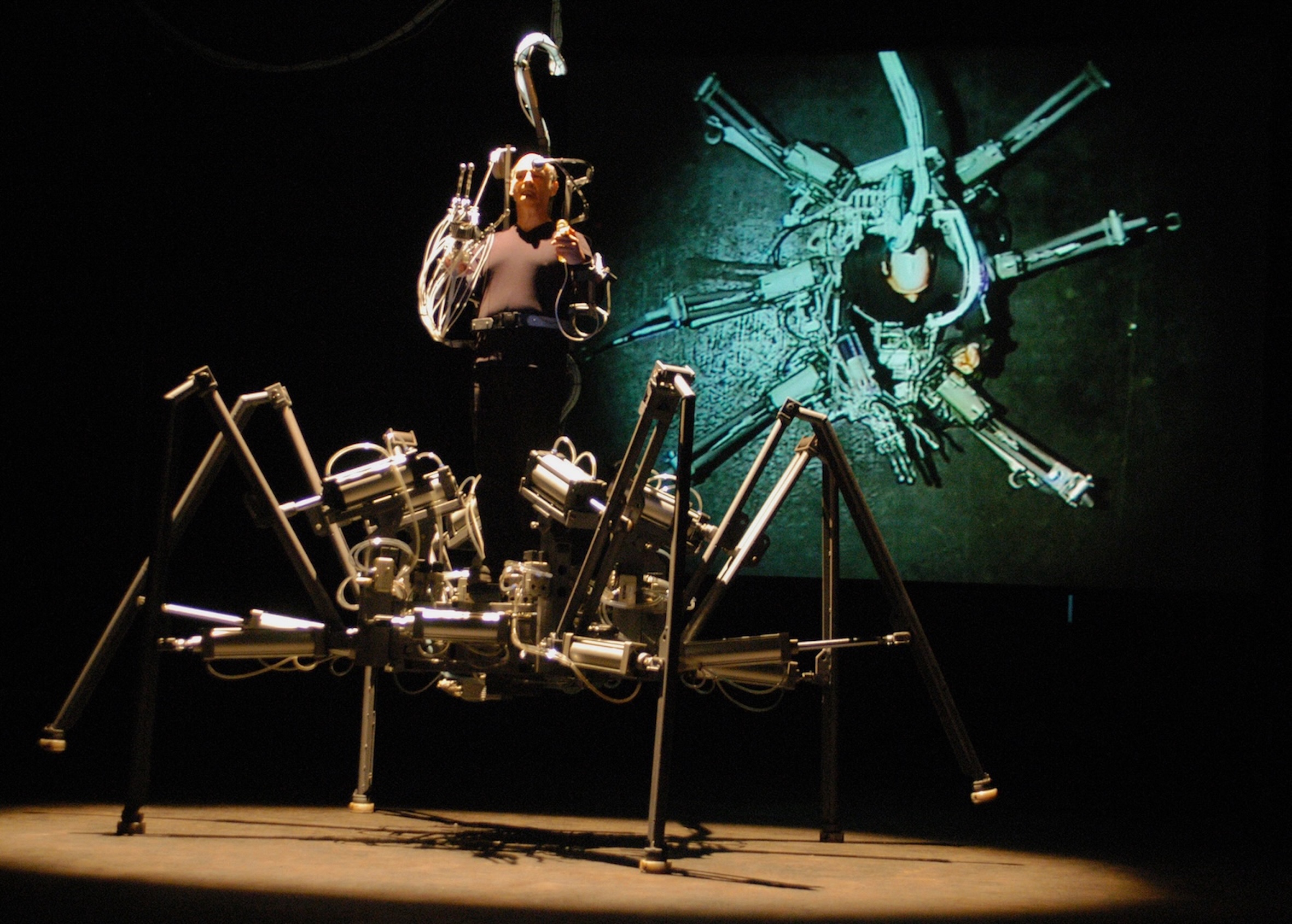
Exoskeleton is a six-legged, pneumatically powered walking machine has been constructed for the body. The robot can walk forwards and backwards with a ripple gait, sideways with a tripod gait, it can squat it can stand and it can turn and stomp on the spot. The body is positioned on a turn-table, enabling it to rotate about its axis. It has an exoskeleton on its upper body and arms. The left arm is an extended arm with pneumatic manipulator having 11 degrees-of- freedom. It is human-like in form but with additional functions. The fingers can split open and close , becoming multiple grippers. There is individual flexion of the fingers, with thumb and wrist rotation. The body actuates the walking machine, selecting the leg motions by moving a controller and arm movements. Different gestures make different motions- a translation of limb to leg motions. The body’s arms guide the choreography of the locomotor’s movements and thus compose the cacophony of pneumatic and mechanical and sensor modulated sounds. Cameras positioned on the robot enable close up images of the mechanism and the artist and cameras positioned in the space above and around the robot generate alternative views that are project large on a screen. A large shadow is projected in the space that alters in size and shape depending on its proximity and position to the spotlight.
Credits
Creation and Performance: Stelarc
Machine Design and Construction: Tom Diekmann, Stefan Doepner, Gwendolin Taube
Machine Electronics and Programming: Lars Vaupel
Technical Assistance: Joy Wagner
Manipulator Construction: Jan Cummerow
Manipulator Programming: Ulf Freyhow
Computer Simulation: Steve Middleton
Photography: Igor Skafar
Robots used
A large spider-like contraption made with metal scaffolding and pneumatic tubes, with an internal cockpit from which a pilot can control and navigate the robot.